Dense Reader Mode y anticolisión en los lectores UHF
Estamos acostumbrados a oír hablar de las interferencias entre tags (colisión), y del algoritmo de la anti-colisión para prevenirlas. En cambio no se habla tan a menudo de las interferencias entre lectores, que se intentan evitar con el RFID Dense Mode.
Los lectores near-field (de campo cercano) utilizan el campo electromagnético para comunicarse con los tags. El flujo electromagnético disminuye muy rápidamente y como habitualmente los lectores near-field no se instalan muy cercanos unos a otros, no se interfieren entre ellos.
Las interferencias entre lectores son un problema para los lectores de la frecuencia UHF y microondas que operan en campo lejano (far-field). Las medidas para evitar las interferencias incluyen:
► El aislamiento físico
► El uso de materiales absorbentes
► Apantallamiento
► Reducir la potencia de transmisión
► Frequency hopping (salto de frecuencia)
► Separación entre transponders
El entorno operativo de un lector está definido como una región dentro de la cual las transmisiones RF de un lector se atenúan menos de 90 dB (aproximadamente una esfera de 1 km de radio).
Cuando la transmisión entre un lector y un tag comparten un mismo canal, la transmisión del lector es 100 dB mayor que el backscatter del tag. Los lectores que están dentro de un mismo canal (in-channel), enmascaran los tags cercanos. Para solucionar este problema, el protocolo Generation 2 provee tres niveles de operación del lector:
El número de canales disponibles en USA es 50, mientras que en Europa es de 20.
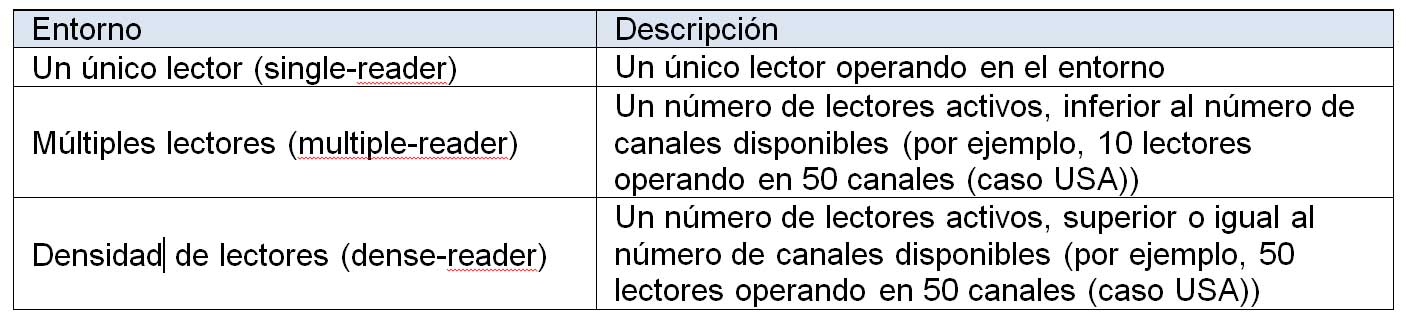
Las interferencias son mitigadas por el entorno y los modos en los que los lectores operan. En los entornos en los que hay un único lector en una instalación en particular, sin ningún otro en funcionamiento a su alrededor, este lector único puede transmitir en cualquiera de los canales que él crea adecuado según su configuración en un momento dado. El lector no tendrá interferencias provenientes de otros lectores, pero puede encontrar interferencias provenientes del entorno o del “rebote” de sus propias transmisiones u otras señales. Este tipo de interferencias se puede minimizar apantallando debidamente y ajustando la potencia de la señal y la ganancia de la antena.
Si hay varios lectores actuando simultáneamente en un mismo entorno, pero el número es menor que el número de canales disponibles, nos encontramos en un entorno con múltiples lectores. En este tipo de entornos, los lectores pueden causar interferencias entre ellos, pero se pueden evitar asignando canales específicos a lectores específicos o bien por división del tiempo.
En un entorno con alta densidad de lectores, el número de lectores en operación es mayor que el número de canales disponibles. Los lectores certificados incorporarán esquemas (identificados en las especificaciones Gen2) para minimizar estas interferencias mutuas.
Nota: con el objetivo de poder gestionar con éxito un entorno con alta densidad de lectores, es esencial que todos los lectores puedan operar en “Dense Reader Mode”. Si un lector no puede operar en este modo, no funcionará la instalación global.
Dense Reader Mode
El “Dense Reader Mode” permite la operación de múltiples lectores localizados en proximidad cercana unos de otros sin provocar interferencias entre ellos. El “Dense Reader Mode” también puede implicar asignaciones especiales en las cuales los lectores y tags están separados según su capacidad para comunicarse en varios canales, de manera que las señales fuertes de los lectores no “enmascararán” las respuestas más débiles de los tags.
Los lectores que tienen la certificación EPC Gen2 usan el “Dense Reader Mode” cuando el número de lectores presentes en un entorno excede el número de canales disponibles. En América del Norte se utiliza el “Dense Reader Mode” si hay más de 50 lectores en una misma instalación. En Europa se utiliza este modo de funcionamiento si el número de lectores es superior a 10 y operan a la máxima potencia RF permitida.
El “Dense Reader Mode” permite la coordinación de los lectores de manera que no haya dos que estén transmitiendo en el mismo momento a la misma frecuencia exacta, y por lo tanto causando interferencias entre ellos dentro de sus zonas de transmisión. Para hacer esto, muchos lectores, especialmente los americanos (con certificación FCC), realizan saltos de frecuencia (frequency hopping) y soportan una función llamada escuchar antes de hablar (listen before talk, LBT).
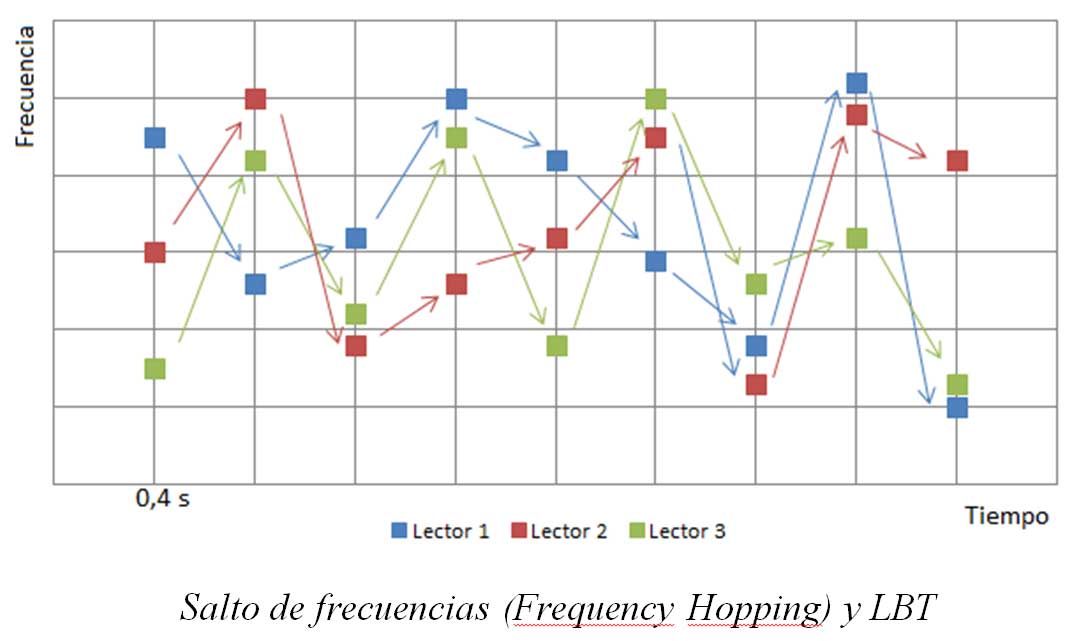
El salto frecuencial (frequency hopping) emplea una tecnología que fuerza a los lectores a cambiar los canales de transmisión constantemente dentro de un rango de frecuencias. Por ejemplo, un lector UHF certificado por la FCC para operar en América del Norte debe soportar el salto frecuencial entre 50 canales (cada uno de 500 kHz de amplitud), entre frecuencias de 902 hasta 928 MHz, y no estar más de 0,04 segundos en cada canal durante la rotación.
Para ejecutar el Listen Before Talk (LBT), los lectores utilizan una antena (generalmente una antena dedicada) para escuchar cuál es la frecuencia por la cual el lector va a transmitir. Si hay otro lector comunicándose por ese canal, entonces cambiará automáticamente al siguiente canal disponible y transmitirá por ahí. La tecnología LBT a menudo se usa con el salto frecuencial y es requerida en Europa para las operaciones en alta densidad de lectores.
Otras formas del Dense Reader Mode, incluyen asignación espectral, control de la división del tiempo por parte del lector, sincronización por software, y controles de temporización de hardware de plataformas lectoras.
La asignación espectral designa una porción del rango de frecuencias para cada tipo de comunicación. Esto permite a los tags poder “hablar” por diferentes canales de donde lo hacen los lectores, lo que previene que se interfieran los unos a los otros.
El control del lector de la división de tiempo se realiza típicamente con un controlador de sistema de back-end que determina cuándo cada lector tiene permiso para comunicar. Con este método, a cada lector se le asigna un periodo de tiempo para comunicarse, y entonces se apaga para esperar su próximo turno, mientras los otros lectores están comunicando.
La sincronización por software permite a los lectores comunicarse entre ellos y determinar cuál puede transmitir y en qué momento, a través del software embebido en el sistema operativo del lector.
La sincronización de hardware normalmente empleará el uso de dispositivos de activación para permitir a los lectores comunicarse durante periodos de tiempo controlados. Por ejemplo, cuando un objeto rompe un haz de luz en el camino hacia la zona de interrogación, se inicia el ciclo de lectura. A medida que el objeto abandona la zona de interrogación, rompe otro haz que le indica al interrogador que deje de hacerlo.
En FQ Ingeniería Electrónica tenemos a disposición de los clientes lectores/grabadores UHF EPC Class 1Gen 2, tanto para el mercado Americano (FCC) como para el Europeo (EU). Todos los modelos están disponibles para cualquiera de los mercados. Por ejemplo, lectores de largo alcance:

Lector UHF de largo alcance Dense Mode
Gestión de la población de tags
Los lectores soportan varios comandos y funciones usados para gestionar la población de tags. Pueden dirigirse a todo un grupo de tags para realizar el inventario de todos los que hay en el área, así como para individualizar cada tag para acceder a su memoria y realizar operaciones de lectura y escritura.
Los siguientes comandos de lector son los más importantes:
• Select: se usa para determinar qué grupo de tags responderá (por ejemplo, este comando puede ser utilizado para diferenciar los tags en cajas de los tags en ítems).
• Inventory: se utiliza para identificar individualmente los tags en un grupo.
• Access: se utiliza para comunicar con tags individuales y enviarles comandos una vez ya se han diferenciado unos de otros.
• Kill: una vez que ya se ha accedido al tag y se ha establecido un canal de comunicación seguro, este comando puede ser usado para hacer que el tag deje de funcionar, es decir, para “matarlo”. Los tags a los que se les ejecuta este comando, ya no responderán más a los comandos de los lectores y no podrán ser “resucitados”.
• Lock: se utiliza para asegurar los contenidos del tag. Una vez se ha emitido este comando, protege al tag de ser leído o grabado. También se puede utilizar para asegurar bancos de memoria de tags individuales.
Los lectores Gen2 soportan estos comandos y funciones de gestión de tags, como las sesiones.
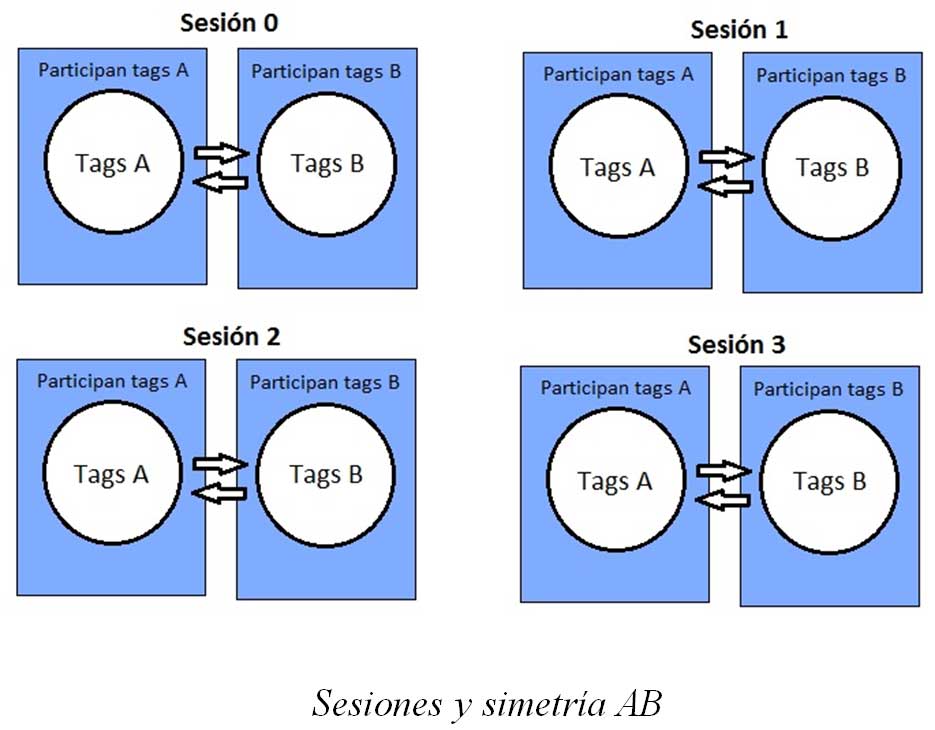
Los tags Gen2 soportan 4 sesiones. Esta función se usa cuando otros lectores o grupos de lectores están “interrogando” el mismo grupo de tags. El tag utiliza cada sesión para comunicarse con un lector o grupo de lectores. De esta manera, si un tag se comunica con un lector y ha sido marcado como B (por ejemplo), un segundo lector comunicando con el tag usará una segunda sesión con sus propios marcadores A y B. Esto evitará que los lectores se interfieran entre ellos al hacer los inventories y evitará la confusión que puede ocasionar un lector que lea un tag dos veces.
Anti-colisión
Hay varios tipos de métodos RFID anti-colisión, pero básicamente se pueden reducir a dos tipos básicos: determinista y probabilístico. Un ejemplo determinista es un algoritmo de árbol binario, en cambio, un ejemplo probabilístico es el algoritmo ALOHA de anti-colisión.
Algoritmo probabilístico
En un método probabilístico, los tags responden en tiempos generados aleatoriamente. Si se da una colisión, los tags que han colisionado tendrán que identificarse de nuevo después de esperar un periodo de tiempo aleatorio basado en un número aleatorio que el mismo tag selecciona. Este proceso separará e identificará eventualmente todos los tags en la zona de “interrogación”, pero podría ser propenso a colisiones porque es posible que los tags escojan números demasiados cercanos unos a otros. A pesar de ello, este algoritmo generalmente se puede ajustar basándonos en el número de tags en la zona de interrogación para incrementar la eficiencia y disminuir las colisiones. Los lectores Gen2 utilizan el algoritmo ALOHA.
Algoritmo determinista
El algoritmo determinista funciona preguntando por bits en el ID del tag, y sólo los tags con los ID correspondientes van a responder. Empieza preguntando por los primeros números del tag hasta que encuentra correspondencias; entonces continúa preguntando por caracteres adicionales hasta que son encontrados todos los tags dentro de una región. Este método es antiguo pero finalmente lleva a menos colisiones y una búsqueda más certera de los tags dentro de la zona de lectura.
Todos los equipos de FQ Ingenieria, tanto de HF como UHF, soportan los algoritmos de anticolisión. No dudes en contactarnos en info@fqingenieria.com para que te ayudemos a decidir el modelo más adecuado para tu proyecto.